






Zenmuse L2, Basic Care 2 roky, 3D laser skener
Vyzvednout lze v prodejně ihned, u Vás pondělí 13.5.
Vysoce přesný letecký systém LiDAR
ZENMUSE L2
Špičkový dosah, zvýšená přesnost
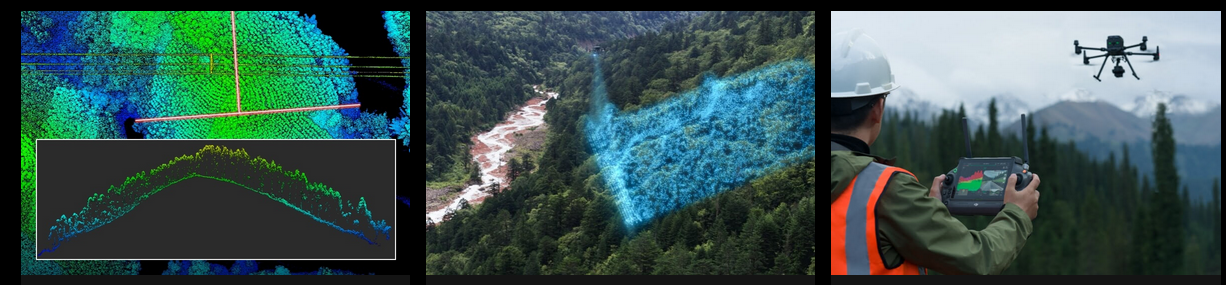
Zenmuse L2 integruje rámový LiDAR, vlastní vysoce přesný systém IMU a mapovací kameru 4/3 CMOS RGB, což letovým platformám DJI poskytuje přesnější, efektivnější a spolehlivější sběr geoprostorových dat. Při použití se systémem DJI Terra poskytuje hotové řešení pro sběr 3D dat a vysoce přesné následné zpracování.
Vysoká přesnost:
Vertikální přesnost: 4 cm;
Horizontální přesnost: 5 cm [1]
Výjimečná účinnost:
2,5 km2 pokrytých během jediného letu [2]
Lepší pronikání:
Menší laserové body, hustší mračna bodů
Dosah detekce [3]
250 m @10% odrazivost, 100klx
450m @50% odrazivost, 0klx
5 možností návratů
Řešení na klíč [4]
Řešení na klíč [4]
Point Cloud LiveView
Zpracování jedním kliknutím na DJI Terra
Integrované řešení LiDAR
Za podpory výkonného hardwaru umožňuje L2 přesné skenování složitých objektů v rozšířeném rozsahu a rychlejší získávání mračna bodů. Během operací mohou uživatelé na místě prohlížet, přehrávat a zpracovávat modely mračna bodů, přičemž zprávy o kvalitě úloh generuje aplikace DJI Terra, která nabízí jednoduché řešení na jednom místě pro zvýšení celkové efektivity. Uživatelé tak mohou dosáhnout vysoce přesných výsledků mračna bodů s následným zpracováním na jednom místě.
Přesnost na vysoké úrovni
Kombinací GNSS a vysoce přesné IMU vlastní konstrukce dosahuje toto řešení vertikální přesnosti 4 cm a horizontální přesnosti 5 cm. [1]
Výjimečná účinnost
Je připraven k práci ihned po zapnutí a dokáže během jediného letu shromáždit geoprostorová i RGB data z oblasti o rozloze 2,5 km2. [2]
Intuitivní ovládání
Ve spojení se systémy Matrice 350 RTK a DJI Terra nabízí L2 řešení na klíč, které se snadno používá, a snižuje tak provozní práh.
LiDAR na bázi snímků
Zvýšení dosahu detekce o 30 % [5]
L2 dokáže detekovat na vzdálenost 250 metrů při 10% odrazivosti a 100 klx [3] a až 450 metrů při 50% odrazivosti a 0 klx. [3] Typická operační výška nyní sahá až do 120 metrů, což výrazně zvyšuje bezpečnost a efektivitu provozu.
Menší laserové skvrny (???), hustší mračna bodů
Díky zmenšené velikosti bodu 4 × 12 cm @100 m, což je pouze pětina velikosti bodu L1, detekuje L2 nejen menší objekty s více detaily, ale může také proniknout hustší vegetací a vytvářet přesnější digitální výškové modely (DEM).
Podporuje 5 návratů
V hustě zarostlých oblastech může L2 zachytit více bodů na zemi pod listím.
Efektivní rychlost bodů: 240 000 bodů/s
V režimu jednoho i více návratů může L2 dosáhnout maximální rychlosti vysílání bodů 240 000 bodů za sekundu, což umožňuje získat více dat z bodů v daném časovém rámci.
Dva režimy skenování
Skener L2 podporuje dva režimy skenování, které uživatelům nabízejí flexibilitu v závislosti na jejich požadavcích. V režimu opakovaného skenování může LiDAR L2 dosáhnout jednotnějších a přesnějších mračen bodů a zároveň splnit požadavky na vysoce přesné mapování. V režimu neopakovaného skenování nabízí hlubší průnik pro získání více strukturálních informací, takže je vhodný pro inspekci elektrického vedení, lesnický průzkum a další scénáře.
Design na bázi rámu
Konstrukce založená na snímcích vede k efektivní rychlosti přenosu dat mračna bodů až 100 %. Spolu s tříosým kardanem přináší více možností do scénářů průzkumu.
Vysoce přesný systém IMU
Zvýšená přesnost
Vysoce přesný systém IMU vlastního vývoje v kombinaci s polohovým systémem RTK dronu pro fúzi dat při následném zpracování poskytuje společnosti L2 přístup k vysoce přesným informacím o absolutní poloze, rychlosti a poloze. Kromě toho zlepšená přizpůsobivost systému IMU okolním podmínkám zvyšuje provozní spolehlivost a přesnost systému L2.
Přesnost vychýlení [6]
V reálném čase: 0,2°, po zpracování: 0.05°
Přesnost náklonu/výkyvu [6]
V reálném čase: 0,05°, po zpracování: 0,025°.
Žádné zahřívání IMU
Výkon systému IMU byl výrazně zvýšen a je připraven k použití v okamžiku, kdy je zapnut. A doprovodný dron je připraven zahájit úkoly okamžitě, jakmile je RTK ve stavu FIX, což přináší optimalizovaný zážitek v terénu.
Mapovací kamera RGB
4/3 CMOS, mechanická závěrka
Velikost pixelů byla zvětšena na 3,3 μm a efektivní pixely nyní dosahují 20 MP, což má za následek výrazné zlepšení celkového zobrazení a také obohacení detailů věrného barevného mračna bodů. Minimální interval fotografování byl zkrácen na 0,7 sekundy. Mapovací kamera má až 200 000násobnou závěrku, což dále snižuje provozní náklady. Pokud není potřeba sběr mračna bodů, může kamera RGB stále pořizovat fotografie a videa nebo sbírat snímky pro mapování ve viditelném světle.
Vylepšené provozní vlastnosti
Rozmanitý let: Typy tras:
Podporuje typy tras Waypoint, Area a Linear Route pro zpracování geodetických úloh v různých prostředích.
Mračna bodů: LiveView:
Během provozu podporuje DJI Pilot 2 tři režimy zobrazení - RGB, mračno bodů a zobrazení mračna bodů/RGB vedle sebe, které intuitivně zobrazuje provozní výsledky. Aktivace funkce RNG (Laser Rangefinder) umožňuje přístup k informacím o vzdálenosti mezi modulem LiDAR a objektem ve středu FOV, což zvyšuje bezpečnost letu. Podporuje také čtyři režimy barvení mračna bodů v reálném čase - odrazivost, výška, vzdálenost a RGB.
Model mračna bodů: Přehrávání a slučování
Po provedení operace lze 3D model mračna bodů [7] zobrazit přímo v albu. 3D modely mračna bodů z více letů lze také sloučit, což umožňuje rozhodování na místě ohledně kvality provozu.
Automaticky generovaná úloha: Reporting kvality
Po sběru dat z mračna bodů aplikace DJI Pilot 2 automaticky vygeneruje zprávu o kvalitě úlohy [8], takže operátoři mohou kontrolovat provozní výsledky v reálném čase a přímo na místě, takže práce v terénu probíhá rychleji a bez starostí.
PPK Řešení: Zpracování jedním kliknutím v systému DJI Terra
Dosáhněte efektivního a spolehlivého jednorázového následného zpracování při importu dat mračna bodů do systému DJI Terra. Po výpočtu trajektorie mračna bodů a optimalizaci přesnosti vygenerujte 3D model mračna bodů ve standardním formátu pouhým kliknutím. Po klasifikaci pozemních bodů pomocí Ground Point Type lze vyhotovit DEM. Kvalitu mračna bodů lze analyzovat pomocí funkce Kontrola a kontrola přesnosti.
1. Měřeno za následujících podmínek v laboratorním prostředí DJI: Zenmuse L2 namontovaný na Matrice 350 RTK a zapnutý. Použití funkce Area Route programu DJI Pilot 2 k plánování trasy letu (s povolenou funkcí Calibrate IMU). Použití opakovaného skenování s RTK ve stavu FIX. Relativní výška byla nastavena na 150 m, rychlost letu na 15 m/s, sklon gimbalu na -90° a každý přímý úsek letové trasy byl kratší než 1500 m. Oblast obsahovala objekty se zjevnými úhlovými prvky a používala exponované kontrolní body tvrdé země, které odpovídaly difuznímu odrazovému modelu. Pro následné zpracování byla použita aplikace DJI Terra se zapnutou funkcí optimalizace přesnosti mračna bodů. Za stejných podmínek bez zapnuté funkce Optimize Point Cloud Accuracy je vertikální přesnost 4 cm a horizontální přesnost 8 cm.
2. Měřeno pomocí Zenmuse L2 namontovaného na Matrice 350 RTK s rychlostí letu 15 m/s, výškou letu 150 m, mírou překrývání stran 20 %, zapnutou funkcí Calibrate IMU, vypnutou funkcí Elevation Optimization a vypnutým sledováním terénu.
3. Uvedené údaje jsou typické hodnoty. Měřeno s použitím plochého předmětu o velikosti větší, než je průměr laserového paprsku, kolmého úhlu dopadu a atmosférické viditelnosti 23 km. V prostředí se slabým osvětlením mohou laserové paprsky dosáhnout optimálního dosahu detekce. Pokud laserový paprsek zasáhne více než jeden předmět, celkový výkon laserového vysílače se rozdělí a dosažitelný dosah se sníží. Maximální detekční dosah je 500 m.
4. Po zapnutí napájení se IMU nemusí zahřívat; uživatelé však musí počkat, až bude dron RTK ve stavu FIX, než bude moci létat a pracovat.
5. Vypočítáno porovnáním se Zenmuse L1.
6. Měřeno za následujících podmínek v laboratorním prostředí DJI: Zenmuse L2 namontovaný na dronu Matrice 350 RTK a zapnutý. Použití funkce Area Route programu DJI Pilot 2 k plánování trasy letu (s povolenou funkcí Calibrate IMU). RTK ve stavu FIX. Relativní výška byla nastavena na 150 m, rychlost letu na 15 m/s, sklon gimbalu na -90° a každý přímý úsek letové trasy byl kratší než 1500 m.
7. 3D modely byly zpracovány pomocí řídké reprezentace.
8. Podporuje pouze generování zpráv o kvalitě traťových bodů, ploch a liniových úloh.